
The Core Technologies Behind Humanoid Robots: A Systems Engineering Perspective
From motion control to commercialization—13 years of mechanical engineering insights

As a mechanical engineer with 13 years of experience in the field, I have witnessed the evolution of robotics from industrial automation to humanoid biomimetics. The question that keeps surfacing in technical discussions is: “What are the true core technologies driving humanoid robot development?” Drawing from extensive engineering practice, I offer a systematic analysis of humanoid robotics technology from a mechanical engineer’s perspective.
The Core Technology Stack: Not a Single Breakthrough, but Systems Integration
Many discussions about humanoid robots focus on isolated technical points—motion control, perception systems, or AI algorithms. However, from an engineering standpoint, the true competitive advantage of humanoid robots lies in the deep integration and systematic breakthroughs across multiple technical domains.
Motion Control Systems: The Robot’s “Cerebellum”
Motion control represents one of the most challenging technical aspects of humanoid robotics. Unlike industrial robotic arms, humanoid robots require whole-body dynamic coordination and real-time balance control.
Current mainstream implementation approaches include:
Model-Based Control Methods
Establishing kinematic and dynamic models of the robot
Swing leg control through trajectory planning
Implementation of Center of Mass Dynamics (CD) and Whole-Body Dynamics (WBD) modeling
This approach offers solid theoretical foundations and strong predictability. However, its limitations are evident—it demands extremely high model precision and struggles with complex, dynamic real-world environments.
Learning-Based Control Methods
Reinforcement Learning (RL): Robots learn through trial and error in simulation environments
Imitation Learning (IL): Learning motion patterns from human demonstration data
Contact-Implicit Trajectory Optimization (CITO): Simultaneously determining contact modes, forces, and whole-body motion
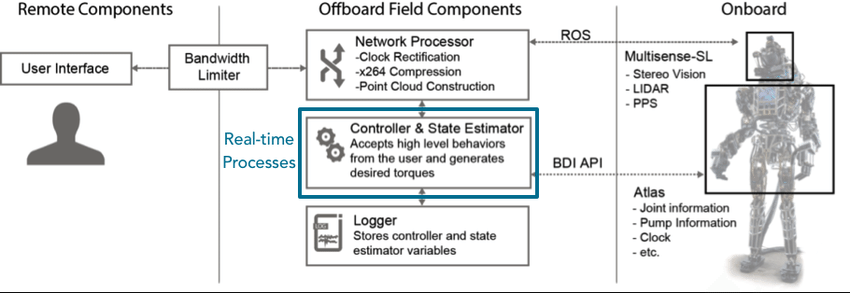
Boston Dynamics’ Atlas achieves its remarkable backflips precisely because of deep expertise in whole-body dynamics modeling and real-time optimization control.
Actuation Systems: The Hydraulic vs. Electric Debate
The actuation system serves as the robot’s “muscles,” directly determining its strength, speed, and agility. The industry currently follows two major technical paths:
Hydraulic Actuation
Advantages: High power density, strong explosive force, capable of extreme motions
Disadvantages: Complex systems, high maintenance costs, relatively slower response
Example: Early Atlas (hydraulic version)
Electric Motor Actuation
Advantages: Fast response, high control precision, simple systems, easy to mass-produce
Disadvantages: Relatively lower power density, limited battery life
Examples: Tesla Optimus, UBTECH, Xiaomi CyberOne
Notably, Boston Dynamics announced in 2024 that the new Atlas would transition to full electric drive. This marks an industry consensus—electric motors are better suited for mass production and commercialization. This doesn’t mean hydraulic technology is obsolete; rather, hydraulics is “too powerful for its own good”—in today’s commercial landscape, the reliability and cost advantages of electric motors carry greater practical significance.
From an engineering practice perspective, the core challenges of electric actuation systems include:
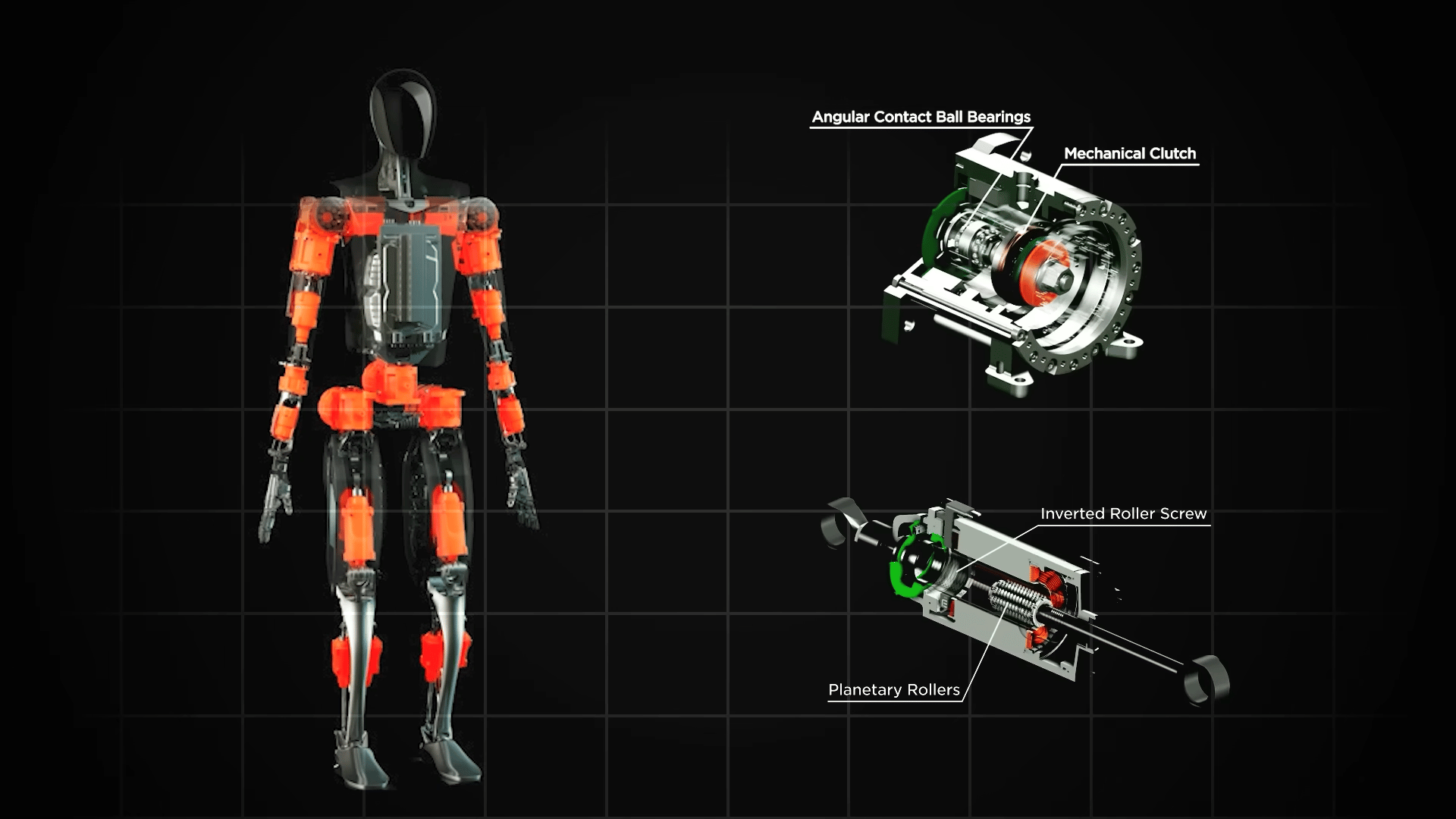
Design and manufacturing of high-torque-density motors
Localization of high-precision transmission mechanisms like harmonic reducers
Optimization of thermal management systems to prevent overheating during extended operation
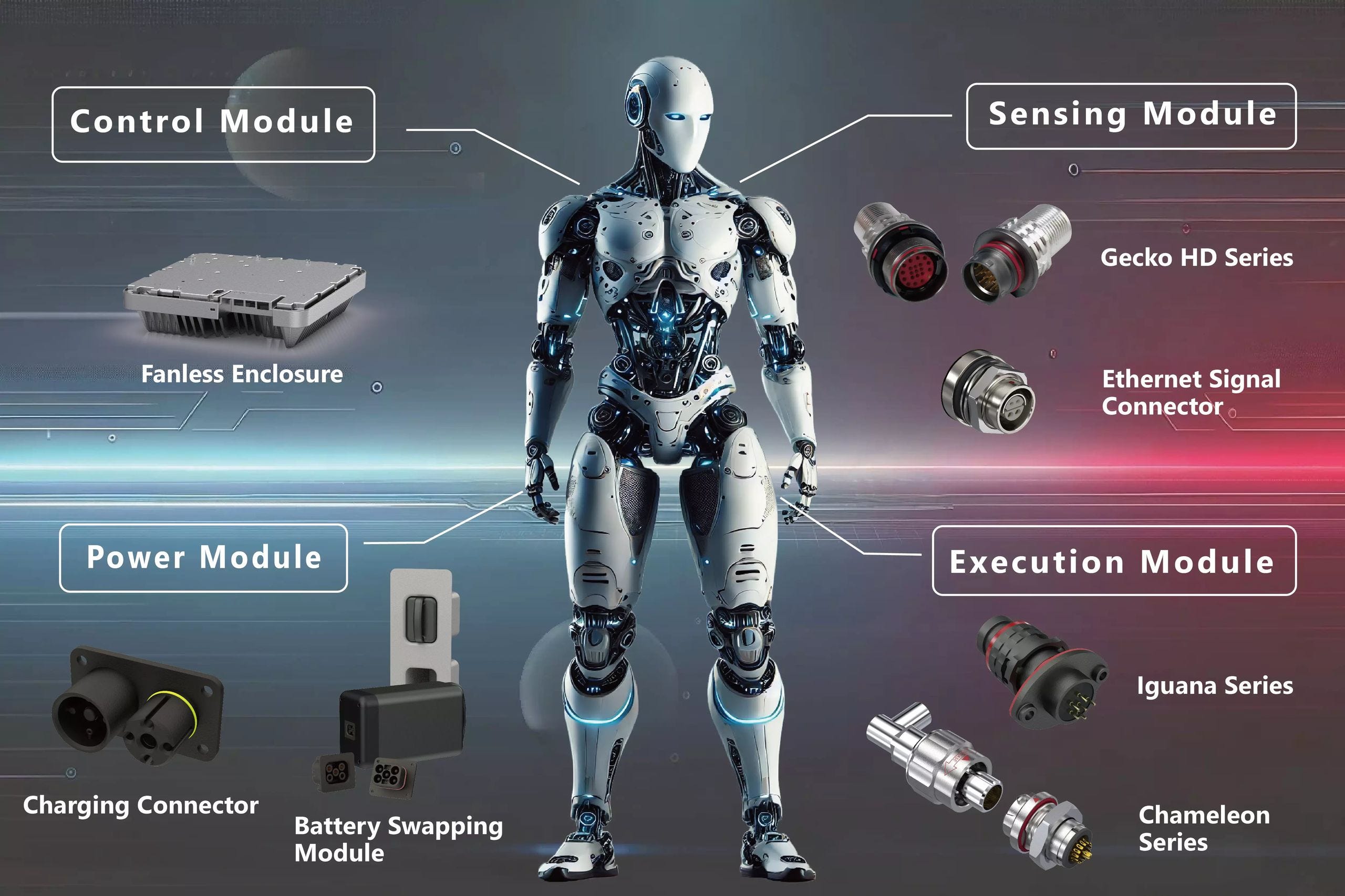
Perception Systems: The Robot’s “Eyes” and “Touch”
Humanoid robots require multimodal perception capabilities to understand complex environments:
Visual Perception
High-definition camera arrays: Providing stereoscopic vision and wide-angle environmental awareness
Depth cameras: Capturing three-dimensional spatial information
LiDAR (select models): Precise ranging and mapping
Tesla’s Optimus employs a vision system equivalent to its autonomous driving technology, utilizing a pure vision approach for environmental understanding. This technology transfer exemplifies the engineering wisdom of cross-domain technology reuse.
Proprioception
IMU (Inertial Measurement Unit): Real-time acquisition of pose and acceleration
Force sensors: Sensing joint force conditions
Tactile sensors: Enabling dexterous hand fine manipulation
From cost and reliability perspectives, traditional sensors remain mainstream. However, with advances in flexible electronics, future humanoid robots may integrate more biomimetic tactile perception capabilities.
AI Algorithms: The “Brain’s” Intelligent Evolution
This is the fastest-changing domain in recent years. Intelligent control of humanoid robots is undergoing a paradigm shift from rule-driven to data-driven approaches:
Traditional Methods
Task planning based on decision trees and state machines
Mechanical execution of preset paths
Limited adaptability
New Paradigm in the Large Model Era
Large Behavior Models (LBM): Acquiring broad motor skills through pre-training on massive behavioral data
Embodied Intelligence: Unifying vision, language, and motion control into end-to-end models
Real-time Decision-making: Dynamically adjusting motion strategies based on environment
Boston Dynamics’ latest videos showcase LBM applications on Atlas—the robot can autonomously understand task requirements, plan execution paths, and dynamically adjust strategies when encountering obstacles. This capability leap results from the deep integration of AI algorithms with mechanical engineering.
Technical Route Comparison: Different Engineering Philosophies
Boston Dynamics: Performance Maximalism
Technical Characteristics
Technical evolution from hydraulics to electric drive
Emphasis on dynamic motion and extreme performance
Deep expertise in whole-body dynamics modeling
Commercialization Challenges
High costs, complex maintenance
Application scenarios focused on specialized fields
Relatively slow mass production progress
Tesla: Engineering Efficiency and Cost Control
Technical Characteristics
Full electric drive, simplified systems
Reusing autonomous driving vision perception technology
Emphasis on manufacturability and supply chain integration
Engineering Advantages
Strong vertical integration, in-house development of motors, reducers, chips
Clear cost control targets (target price $20,000)
Extensive mass manufacturing experience
Chinese Manufacturers: Rapid Iteration and Scenario Implementation
Chinese manufacturers like UBTECH, Xiaomi, and Unitree Robotics have adopted a rapid iteration + scenario validation strategy:
Launching multiple product generations in short cycles
Rapid trial-and-error in industrial, service, and demonstration scenarios
Focus on hardware-software co-optimization
From Technical Breakthroughs to Commercialization: An Engineer’s Sober Reflection
Realistic Assessment of Technology Maturity
Despite impressive demonstrations in videos, from an engineering perspective, significant gaps remain before large-scale commercialization:
Reliability Issues: Vast differences between laboratory environments and real-world conditions
Cost Dilemma: Current unit costs range from hundreds of thousands to millions, far exceeding consumer affordability
Unclear Application Scenarios: Beyond demonstration value, lacking critical applications
Key Technical Bottlenecks
Hardware Level
Insufficient localization of high-performance motors and reducers
Battery endurance limitations (typically 1-2 hours)
Dependence on imported core sensors
Software Level
Large models’ adaptation in robotics still under exploration
Balance between real-time performance and robustness
Sim-to-real transfer gap
System Level
Scarcity of multi-disciplinary talent
Insufficient industrial chain coordination
Undeveloped standards framework
Potential Breakthrough Pathways
From engineering practice, humanoid robot commercialization may follow this trajectory:
Near-term (2025-2027)
Focus on industrial scenarios: warehousing logistics, inspection, simple assembly
Technical iteration: Improving reliability, reducing costs
Algorithm optimization: Enhancing intelligence through large-scale data training
Mid-term (2027-2030)
Entering service scenarios: elderly care, commercial displays, education and training
Forming business models: From selling products to providing services
Maturing industrial chain: Achieving batch supply of core components
Long-term (2030+)
General AI integration: Embodied intelligence reaching higher levels
Significant cost reduction: Approaching consumer-level pricing
Increased social acceptance: Becoming part of daily life
Conclusion: Balancing Technical Rationality and Commercial Reality
Returning to the initial question: “What are the core technologies of humanoid robots?”
My answer: There is no single core technology, but rather systematic breakthroughs in motion control, actuation systems, perception capabilities, AI algorithms, and the ability to balance engineering implementation with cost control.
As a mechanical engineer, I deeply understand the difficulty of technical breakthroughs. Humanoid robots cannot be achieved through some “magic technology” alone but require continuous accumulation across multiple fields—mechanical, electronic, software, materials—finding optimal solutions among performance, cost, and reliability.
The current humanoid robot boom has both genuine technological progress and capital speculation bubbles. For practitioners, maintaining technical rationality and focusing on solving practical engineering problems is the right path to promoting healthy industry development.
For the general public, there’s no need to over-mythologize or dismiss humanoid robots. They will arrive eventually, but perhaps not as rapidly as in science fiction films. Technological evolution has always been incremental—what we need is patience and rationality.
References
Boston Dynamics Official Technical Blog
Tesla AI Day Technical Presentations
Academic research papers on humanoid robotics
Technical white papers and patent literature from major manufacturers
🎯 Master Robotics Engineering (The Way School Never Taught)
After 13 years in the field, I’ve learned that the best engineering knowledge doesn’t come from textbooks—it comes from real projects, failures, and breakthroughs.
That’s what I share every week in The Robotics Engineer’s Digest:
Technical Deep Dives → Real engineering analysis with formulas
Case Study Breakdowns → Learn from $100K+ mistakes (so you don’t repeat them)
Component Selection Guides → Decision frameworks for motors, reducers, sensors
Industry Intelligence → What’s actually happening in humanoid robotics, automation, AI
100% free. Zero spam. Unsubscribe anytime.
💬 What Are You Working On Right Now?
I create content based on what engineers actually need.
Comment below and tell me:
What type of robot/automation project are you working on?
What’s your biggest technical challenge right now?
What topic would you like me to cover next?
100+ engineers have already shared. Your input shapes future articles!
Join 100+ robotics engineers getting smarter every week: